Project Overview:
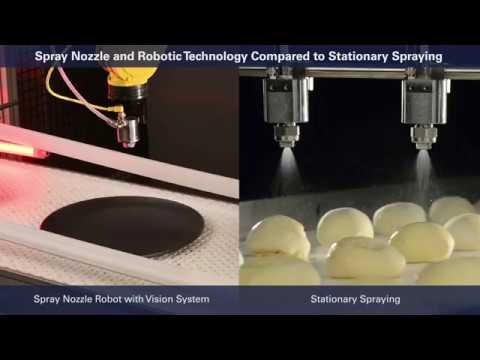
While working at Spraying Systems Co., I was the leader of a small team dedicated to researching and designing a robotic spraying system to be used for multiple industries. Using a 6-axis FANUC robotic arm we attached various nozzles as the end of arm tooling. With this newfound nozzle mobility we were able to create more elaborate spray patterns and greatly reduce liquid waste as seen in the GIF above (playing at 1x speed).
Below is a link to a video demonstration of the robot in action. The video focuses largely on the spraying benefits of using a robotic arm, but it highlights the various manipulation and motion planning skills I learned while working on this project.
Since no one at SSCO. had any previous robotics experience, it was up to me and my team to learn all about industrial robotic safety guidelines, how to incorporate equipment like conveyors, lights, our own spray controllers and most importantly how to use FANUC’s pick and place software and vision system.
Applications
Our main goal was to eventually build and sell turnkey robotic spraying workcells, using FANUC as our robot vendor. But before going to market with this technology my team and I collaborated with a couple different customers on an exploration basis.
Some of applications I worked on included:
- Icing outlines and decorations on various cookies.
- Spraying glue onto custom made countertops.
- Spraying paper plates and trays with a coating used to keep out moisture.
Workflow
For a given application, the general workflow was as follows:
- Use FANUC’s computer vision software to identify key features on the object to be sprayed.
- Run the object down the conveyor until it reached the front of the robot, then stop. This tracked encoder counts from the camera to the robot.
- Teach the spray motion plan on a point to point basis.
- Repeat for any other customer products.
- Test and touch up vision or motion plan as necessary for different object orientations.
It was through repeating this process for a variety of products that I became familiar with different robotic challenges. For instance, it was generally easy to detect the outline of a stationary object, but once we attempted to detect the same object while it was moving, we would often run into issues. I learned that lighting plays a huge role in a successful computer vision system. I also discovered that no matter how careful you think your motion plan is, you’re bound to run into singularities, especially for a moving part at various angles.
While my time working with a FANUC robotic arm may have been short, I am confident it provided a solid foundation in understanding higher level robotics aspects. I’ve even been able to relate topics I’m learning in class back to my previous work experience.